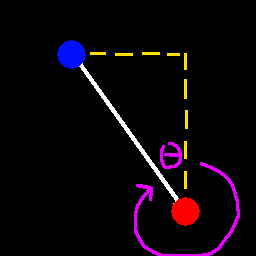
It gives you the direction (yaw) towards a given position. You input the destination X and Z coord and it calculates the yaw that you should move towards to reach that destination in a straight line!